

Rolling Robot
- Categories: Machine Vision, Robotics
- Tools used: Python, Arduino, Jevois Camera, Djikstra Path-finding
- Project date: 2019
- Project Report: Image Recognition & Processing Report
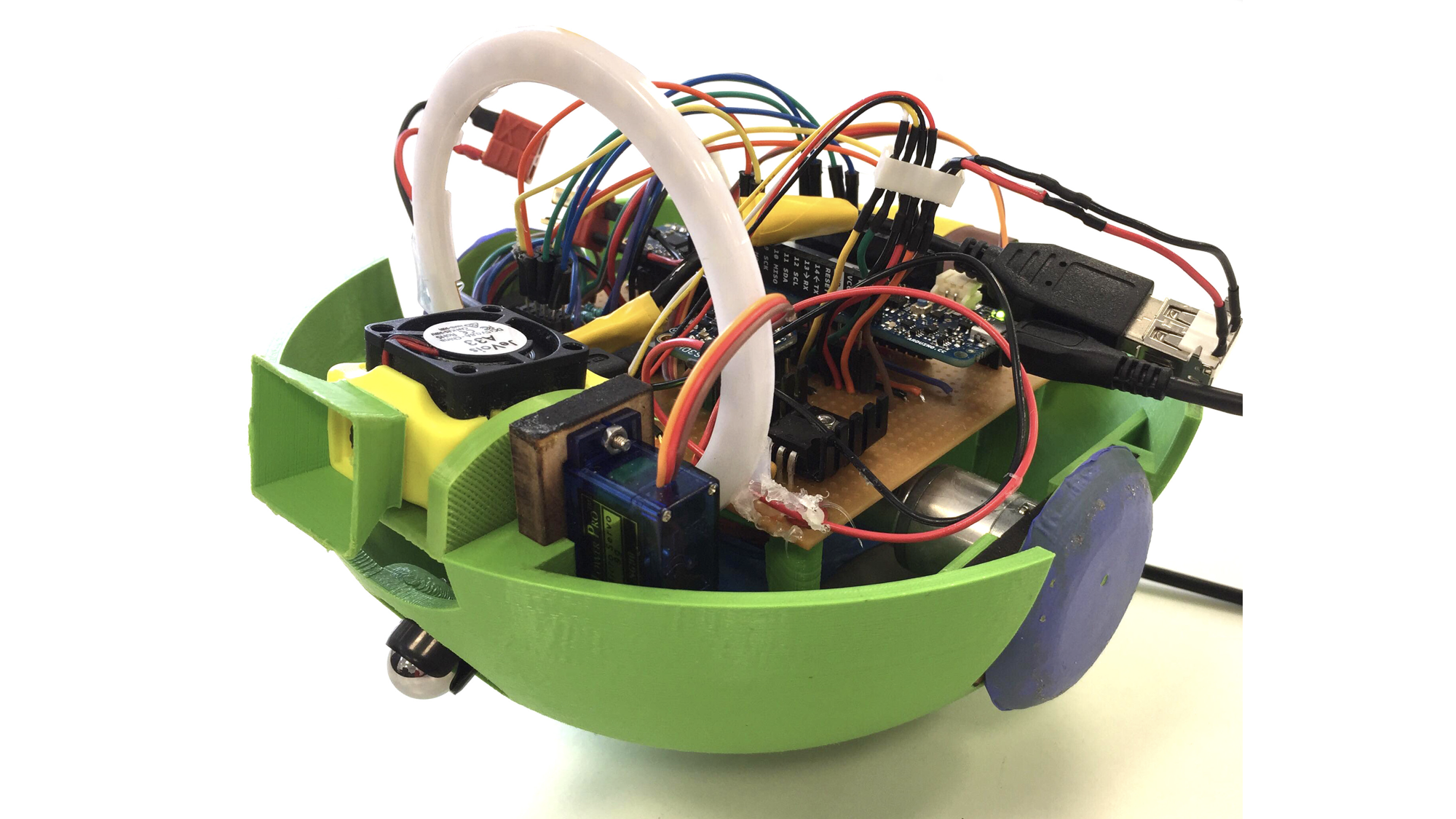
About
As a group project at university, we created a robot which moved inside a hamster ball and used a Jevois machine vision camera to find its way through a maze and chase another moving robot.
My part in the project was to program all of the machine vision code in Python, which would map out the nearby environment and use Djikstra's path-finding algorithm to find a path past a series obstacles to reach a goal.
The program would then continually map the current position and send movement instructions to a microcontroller. See the linked report for more details on how it worked.